|
Район
Штокмановского ГКМ находится в непосредственной близости от арктического
фронта. Вследствие этого метеорологический режим в районе крайне неустойчив во
времени, и погодные параметры характеризуются большой изменчивостью,
обусловленной сменой вариантов адвекции воздушных масс с различными
температурными свойствами: холодных воздушных масс из Арктики и Азиатского
материка (зимой) и теплых – с Атлантического океана и тропических районов. На
акватории непосредственно Штокмановского ГКМ ледообразование не происходит
из-за интенсивного конвективного перемешивания вод. Ледяной покров, который
формируется не каждый год, образуется за счет поступления дрейфующего льда, в
основном, из северных и восточных частей Баренцева моря. При этом район ШГКМ
оказывается в прикромочной зоне. В большинстве случаев ледяной покров
представлен однолетним льдом: ровным и торосистым. Встречаются айсберги.
Вплоть до 2003 г. на акватории месторождения двухлетний лед не наблюдался, однако экспедиция 2003 г. выявила факт аномального вторжения в северную и центральную части Баренцева моря мощных
двухлетних льдов карского происхождения. В непосредственной близости от района
ШГКМ толщина этих льдов составляла 160-270 см. В этом же году было отмечено большое скопление айсбергов на прилегающей акватории.
Глубина
моря на площади месторождения варьирует в пределах 307-350 м: 307 м у южной границы, 315 м - в восточной части, 350 м в юго-восточном и северо-западном углах
площади. Основная часть донной поверхности - субгоризонтальная с глубинами 320-330 м. В центральной и восточной части площади развиты повышенные участки дна с глубинами 315-320 м, с трех сторон они окружены более низкими участками с глубинами порядка 330 м.
Уклон на
склонах мезоформ составляет 2-3о, изредка до 5о. Особенно
выделяются в рельефе узкие протяженные ложбины шириной 150-200 м и длиной 2-3 км. В плане ложбины имеют прямолинейную или сложно-изогнутую форму, U-образное
симметричное сечение и глубину от первых метров до 10-15 м. Уклоны на бортах ложбин колеблются от 1о до 15о. В простирании ложбин
преобладают два направления: юго-запад - северо-восток и северо-запад -
юго-восток. Более широко развиты отрицательные формы рельефа в южной части
площади съемки, вследствие чего рельеф южной части более расчленен по сравнению
с рельефом центральной и северной частей. В целом рельеф дна на месторождении
мелкобугристый.
В рамках объекта
«Дополнительные инженерно-геологические изыскания площадки строительства
нефтегазопромысловых сооружений и трассы продуктопровода Штокмановское ГКМ -
п-ов Териберка» (1991-1992гг.), в составе комплексных исследований была
выполнена детальная съёмка рельефа дна вдоль проектируемых трасс трубопровода
по основной и резервной ниткам.
Представленные в данном
отчете материалы исследований выполненных ОАО «АМИГЭ» в 2007 году в рамках
объекта: «Рекогносцировочные геофизические и промерные работы вдоль трассы
«Губа Опасова – Штокмановское ГКМ», характеризуют проектируемую трассу
трубопровода вдоль резервной нитки.
На рисунке 5.2
приведены данные промерных работ 1991-1992гг. и 2007г. В результате сравнения
данных разных лет нами не выявлено существенных различий в измеренных глубинах
моря вдоль центральной линии профиля.
Незначительные отличия
связаны с тем, что для построения профиля дна по работам 1991-1992гг. глубины
моря снимались с батиметрических планшетов вручную с помощью дигитайзера, при
этом снималась точка пересечения линии проектируемого трубопровода с изобатой,
а для построения профиля 2007 года использовались непосредственно данные
центрального луча эхолота, которых существенно больше. Несмотря на это, отличия
данных промера разных лет не превышают указанной в требованиях Технического
Задания величины допустимой погрешности измерений 0,5%. Такие же выводы напрашиваются
и для мелководной части (район входа в губу Опасова).
Исходя из этого, можно
сделать следующие выводы:
- за прошедшие более
чем 15 лет, существенных изменений рельефа дна вдоль проектируемой трассы не
отмечено;
- применяемая система
многолучевого эхолотирования для съемки рельефа дна при проектировании линейных
сооружений является методически наиболее обоснованной и высокоточной, что
позволяет вести мониторинг донной поверхности на всех стадиях проектирования и
строительства сооружений.
6
ВИДЫ РАБОТ
Поставленные задачи
будут решаться комплексом методов в составе:
·
Навигационное
обеспечение, в т.ч. позиционирование с использованием ультракороткобазисной
гидроакустической системы подводной навигации;
·
Многолучевое
эхолотирование;
·
Сейсмоакустическое
профилирование;
·
Гидролокация
бокового обзора (с опцией батиметрии и без нее);
·
Магнитометрическая
съемка.
6.2
Методика геофизических изысканий
Схема
производства работ представлена на рисунке 6.1.
Данные МЛЭ будут
регистрироваться на жестком диске компьютера сбора данных в форматах SPL
(Fugro) и XTF.
Оператор будет производить контроль качества входящих данных МЛЭ и периферийных
устройств: гирокомпасов, датчиков движения и систем позиционирования.
Для учета скорости
звука в воде и рефракции при обработке данных многолучевого эхолота, дважды
будут производиться измерения скорости звука. Такой интервал основан опытом
работ 2006 – 2007 годов, когда наблюдения подтвердили предположение, что
профиль скорости звука изменяется с периодом 12 часов.
Сейсмоакустический
профилограф и гидролокатор бокового обзора смонтированы в едином теле. На
грузонесущем бронированном кабеле оно буксируется на расстоянии до 1200 – 1400 метров от судна. На расстоянии 20 – 30 метров от системы буксируется магнитометр.
Гидролокация бокового
обзора
Требуемая высота буксировки, в первую очередь определяется полосой
обзора гидролокатора бокового обзора. Задачей гидролокации
бокового обзора (ГЛБО) является выявление потенциально опасных объектов на
морском дне. Установленные на буксируемом теле антенны с заданным интервалом
(определяемым полосой обзора), излучают акустические импульсы. Сразу после
излучения начинается прием отраженных сигналов. Прием продолжается до тех пор,
пока не будет излучен следующий импульс. Затем циклы повторяются.
Возвращенный эхосигнал
от узкой полосы морского дна, перпендикулярной курсу перемещения носителя
антенн, записывается в цифровом виде. Такая запись представляет интенсивность
обратного рассеивания сигнала – амплитуду эхосигнала в функции времени. На
локационном изображении регистрируются зоны с сильными и слабыми
интенсивностями эхосигналов. Совокупность трасс эхосигналов формирует
акустическое изображение поверхности дна – сонограмму.
Установленный в буксируемом теле гидролокатор C3D сочетает не только получение
высокоразрешающего гидролокационного изображения, но и батиметрических данных в
широкой полосе обзора.
Очевидно,
что вероятность выявления цели зависит от количества отражений от нее. Принято,
что цель может быть выявлена не менее чем 3 отражениями от нее. Интервал между
посылками по дистанции прямо пропорционален скорости буксировки и полосе
обзора.
Для
полосы обзора 200 метров временной интервал между посылками будет равен 0.266
секунды. При скорости буксировки 4 узла (2.05 м/сек), интервал по дистанции
составит 0.55 метра. С учетом ширины диаграммы направленности, полосы обзора
шириной 200м, со 100 % перекрытием будут выявлены цели размерами 1.2 - 1.5 метра.
На
рисунке 6.1 представлен график вероятности выявления донных объектов (предел
разрешающей способности), в зависимости от полосы обзора и скорости буксировки
гидролокатора бокового обзора.
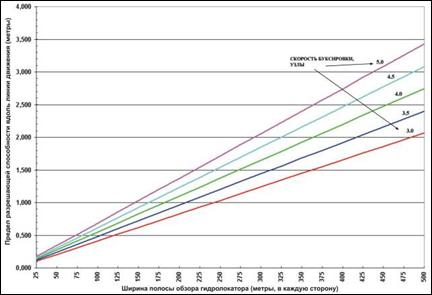
Рисунок 6.1 Вероятность выявления объектов гидролокатором бокового обзора
Для
надежного выявления целей на морском дне высота буксировки должна быть в пределах
10-20% от наклонной дальности. В свою очередь, чем меньше наклонная дальность
(полоса обзора) гидролокатора, тем выше детальность исследований. При принятой
полосе обзора 175 - 200 метров, необходимая высота буксировки над дном составит
20 - 30 метров. При наклонной дальности обзора гидролокатора 175 - 200 метров и расстоянии между профилями 100 метров будет обеспечено 100% перекрытие при работе на
площади и полосе прокладки трубопроводов.
Изыскания будут
проводиться при непрерывном движении судна со скоростью 3.5 – 4.5 узлов. Задача
поддержания необходимой высоты буксировки «рыбы» над дном (20 – 30 метров) будет решаться изменением длины вытравленного кабеля, с помощью пульта дистанционного
управления лебедкой. Длина вытравленного кабеля составит около 3.5 – 4 глубин
моря (для скорости буксировки 3.5 – 4.5 узлов), и достигнет 1200 - 1400 метров. Очевидно, что при резких перепадах глубин дна, вероятность касания грунта и повреждения
буксируемого тела весьма велика. Для уменьшения вероятности аварийных ситуаций
рабочее место оператора будет оснащено монитором, отображающим, с помощью
специальной программы, положение буксируемого тела в пространстве на фоне
цифровой батиметрической модели дна (полученной на рекогносцировочном этапе
работ), так как это показано на рисунке 6.2.
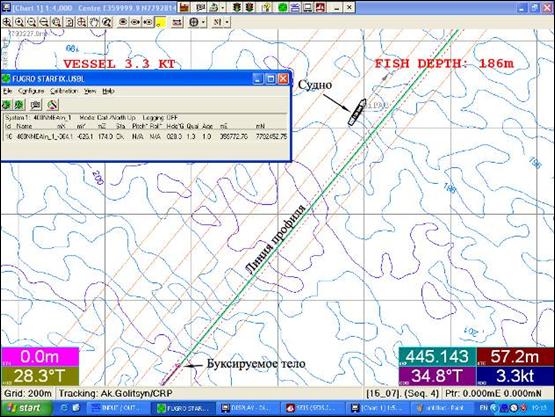
Рисунок 6.2 Окно
контроля положения буксируемого тела
Эта информация позволит
оператору предвидеть резкие изменения рельефа дна и своевременно предпринимать
меры для исключения аварийной ситуации.
Прибрежные участки
будут отрабатываться с использованием катеров. Полоса обзора 50 – 100 метров, расстояние между профилями 15 - 20 метров.
Для работ будет
использоваться малогабаритный гидролокатор «С-MAX».
Дополнительно, непосредственно вблизи берега, будут отработаны по 2 профиля
вдоль береговой линии.
Основной задачей
магнитометрии является идентификация и нанесение на карту потенциальных
геологических и техногенных опасностей, геотехнических явлений которые могут
повлиять на проектирование, прокладку и эксплуатацию трубопровода и морских
нефтегазопромысловых сооружений.
В процессе выполнения
магнитометрических наблюдений будут применяться высокочувствительные морские
магнитометры SeaSPY и Magis.
Магнитометры
будут буксироваться за подводным геофизическим комплексом C3D
на расстоянии от 10 м до 30 м от него с помощью кевларового кабеля.
Координирование
судна будет осуществляться на основе определений места с дискретностью 1
секунда по радиосигналам стандартной точности на частотных диапазонах L1 и L2
спутниковой навигационной системы «Navstar». Для этого будут использованы
специализированные 12-ти канальные 2-х частотные фазовые навигационные
приемники «Starfix HP/XP». Одновременно с приёмом спутниковых радиосигналов системы
«Navstar» в специализированные навигационные приёмники будет поступать
высокоточный сигнал дифференциальной коррекции от ККС «Нарьян-Мар» РДПС
«Starfix», через геостационарный спутник «EA-sat». Минимальный угол возвышения
геостационарного спутника «EA-sat» по результатам предшествующих работ составил
7˚, что обеспечило устойчивый приём сигнала. Цифровая регистрация
поступающей навигационной информации будет выполняться с дискретностью 1 раз в
секунду на основном компьютере сбора информации (формат NMEA-0183). Для этой
цели будет использован промышленный компьютер «Advantech» с программным
обеспечением «Starfix Suite». Ожидаемая
точность позиционирования изыскательского судна – не хуже ±0.5 м.
Навигационная
привязка буксируемого тела будет осуществляться с использованием
ультракороткобазисной системы гидроакустической навигации. Маяк-ответчик будет
крепиться к несущему кабелю, в непосредственной близости от буксируемого тела.
Применяемые
системы ультракороткобазисной подводной навигации в комплексе с периферийным
оборудованием, обеспечат точность привязки буксируемых устройств, при низком
уровне естественных шумов, не хуже 1% от наклонной дальности. Для максимальных
рабочих глубин 350 м, при наклонной дальности 1000 м это составит 10 м. Данные позиции геофизических устройств будут в реальном времени
передаваться и регистрироваться на системы сбора геофизических данных.
Для
геодезической привязки буксируемых устройств в прибрежной зоне, (в зоне
неэффективного использования УКБС) будут использоваться модели переменных
офсетов. В модели офсетов вводятся:
·
Значения
длины вытравленного кабеля;
·
Превышение
точки буксировки над буксируемым устройством;
·
Значения
курса судна;
·
Значения
путевого угла судна;
·
Процентное
соотношение (модель) влияния курса и путевого угла на снос устройства;
·
Коэффициент
провиса кабеля.
По значениям длины
вытравленного кабеля и превышению вычисляется горизонтальное проложение длины
кабеля. По значениям, курса, путевого угла и модели сноса вычисляется курсовой
угол на устройство.
Страницы: 1, 2, 3, 4, 5, 6, 7, 8, 9
| 
